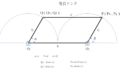
前回は、リンク機構が平行四辺形になっている等長リンクを試してみました。
今回は、リンクの長さが異なる不等長リンクを作ってみました。が、うっかり、中間リンクをそのまま流用してしまったので、固定リンクと同じ長さになってるじゃん (;´Д`)
まぁ大勢に影響は、ないです。ないことにします。
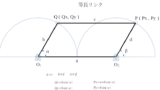
不等長リンク (台形リンク)
不等長リンクにはいくつか種類がありますが、今回作ってみたのは、てこクランク機構というものです。その他には、両てこ機構とか両クランク機構とかあります。
前回作った等長リンクは、平行クランク機構とも呼ばれます。対して今回の不等長リンクは、台形リンクと呼ばれます。
詳しくはグーグル先生に尋ねて下さい、ませ。
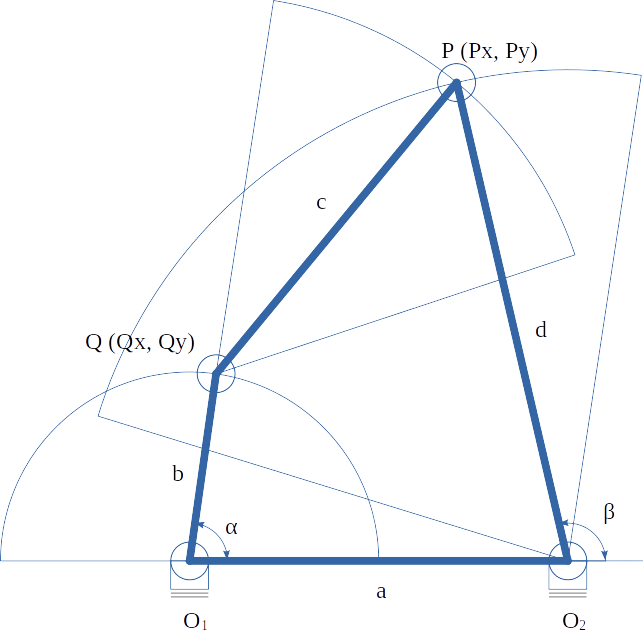
てこクランク機構は、一番短いリンクを駆動リンクとし、隣接するリンクのひとつを固定リンクとしたもの。図 1 では、b が駆動リンク、a が固定リンクとなっています。
従動リンクの座標を求める
従動リンク d のジョイント P 点の座標を求めるには、角度 β が知りたいです。が、不等長リンクで、駆動リンク a の角度 α から角度 β を計算するのは、難しいです。難しい計算はしたくありません。
が、ちょっとだけ、いくつかのポイントを押さえておきましょう。
グラスホフの定理
基本的にこのリンク機構がちゃんと動くのかどうか、それを確認するのが「グラスホフの定理」です。
まず、もっとも長いリンク d の長さが、他のリンクの長さの和よりも小さくないといけません。a、b、c、d 各リンクの長さはそれぞれ、100、50、100、130としましたので、
d < a + b + c 130 < 100 + 50 + 100 成立
まぁ普通に考えればわかりますが、d が長すぎると、四角形にできません。
つぎに、もっとも短かいリンク b と他のひとつのリンクの長さの和が、残りの 2 つのリンクの長さの和より小さいか等しくないといけません。そうしないと、駆動リンク b が回転できなくなります。
b + a ≦ c + d 50 + 100 < 100 + 130 成立 b + c ≦ a + d 50 + 100 < 100 + 130 成立 b + d ≦ a + c 50 + 130 < 100 + 100 成立
いずれも成立しますので、駆動リンク b を 360° 回しても、問題なく動くことがわかりました。
α = 180° のとき

4 節リンク機構では、三角形が形作られる駆動リンクの位置があります。駆動リンクが 1 回転するなかで、三角形は 4 種類できます。
が、今回はサーボモータで駆動するため、α を 0〜180° の範囲で考えるので、3 種類になります。
そのひとつが、α=180° の場合です。
図 2 のように、固定リンク a と駆動リンク b が一直線になったとき、三角形 △PQO2 ができます。
このときの、従動リンク d の角度 β を求めてみましょう。
△PQO2 の 3 辺の長さがわかりますから、余弦定理により内角 ∠O2 を求めます。

したがって、β は、

P 点の座標を求めてみましょう。


b と c が一直線のとき
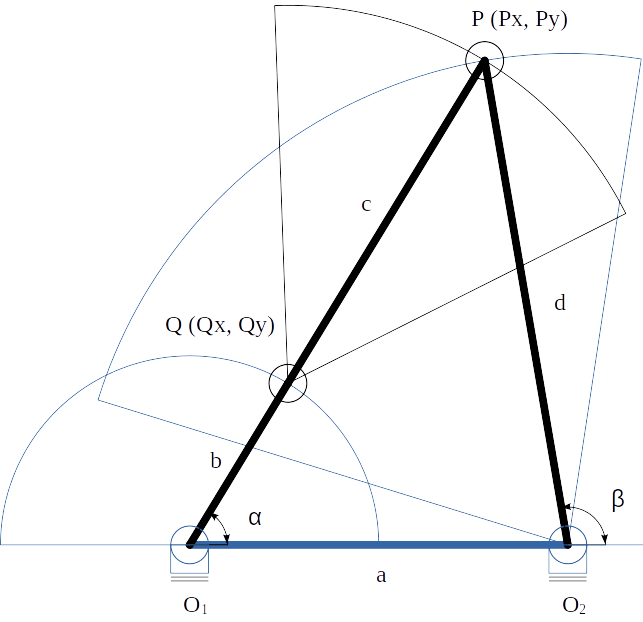
駆動リンク b を右へ回転させていくと、中間リンク c と一直線になったところで、2 つ目の三角形 △PO1O2 ができます。
このときが、従動リンク d がもっとも右へ移動した位置になります。さらに駆動リンク b を右へ回転させると、従動リンク d は反転して左へ戻りはじめます。
駆動リンク b の角度 α と、従動リンク d の角度 β を求めましょう。


P 点の座標は、


α = 0° のとき

駆動リンク b がさらに右に回転し、固定リンク a と重なり合った α = 0° のとき、△PQO2 ができます。
P 点は、α = 180° のときと同じような位置になっていますが、どうでしょうか。座標を確認してみましょう。



不等長リンクの動き
| α | β | Px | Py |
| 0° | 136.3° | 6.01 | 89.8 |
| 58.7° | 99.7° | 78.1 | 128.1 |
| 180° | 138.9° | 2.04 | 85.5 |
ということで。
駆動リンクの角度 α が 180° のとき、従動リンクがもっとも左に位置することがわかりました。また、α が 58.7° のときにはもっとも右に移動します。
で、P 点が通るラインは、中心が O2 で半径 d の円周上、ってことになります。
ちなみに、駆動リンクを 300° あたりまで回すと、4 つ目の三角形ができます。駆動リンクをモータで回すなら確認しておくとよいと思います。